
CrazyFlie2.0にGPSモジュールを搭載するためにfirmwareの開発環境を構築しました。 詳細はこちらを参照して下さい。 http://qiita.com/misoragod/items/f49d5c6622 … 続きを読む
Using ROS with UAVs
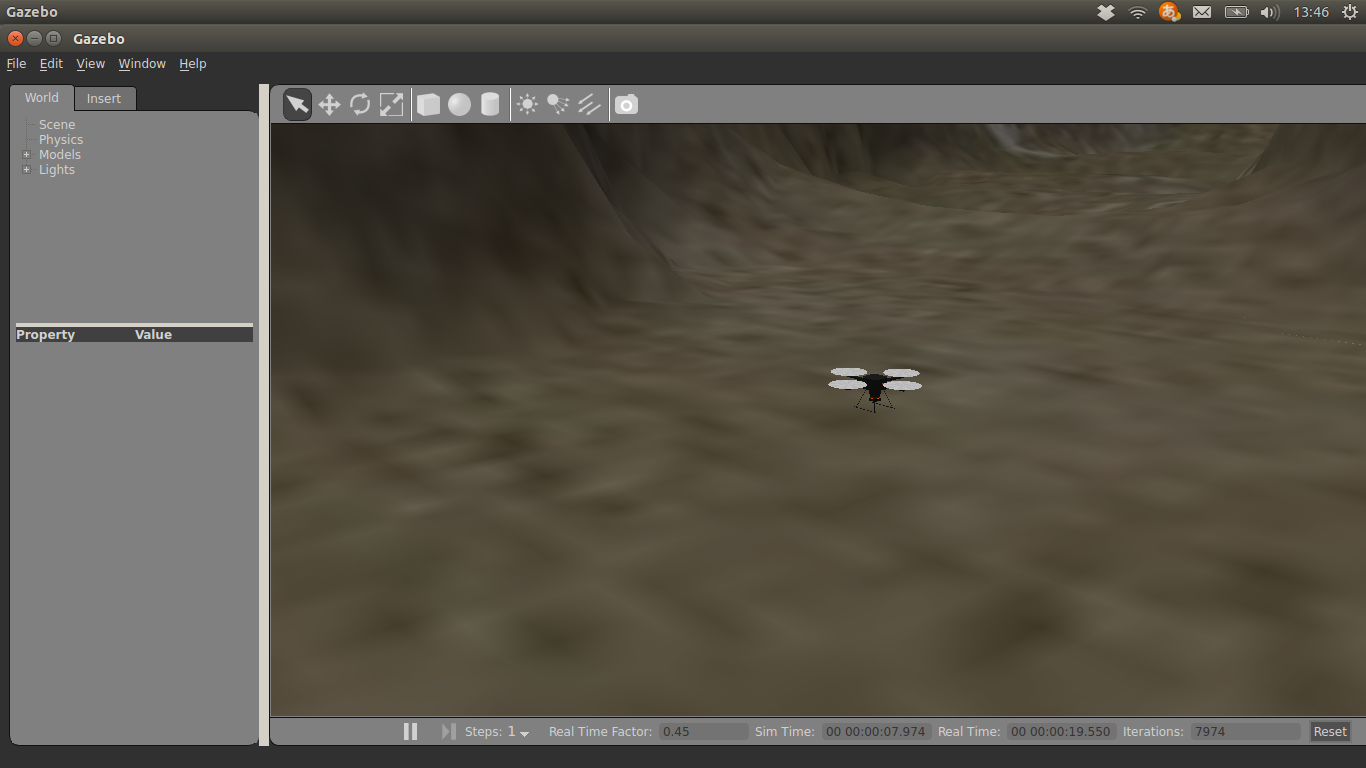
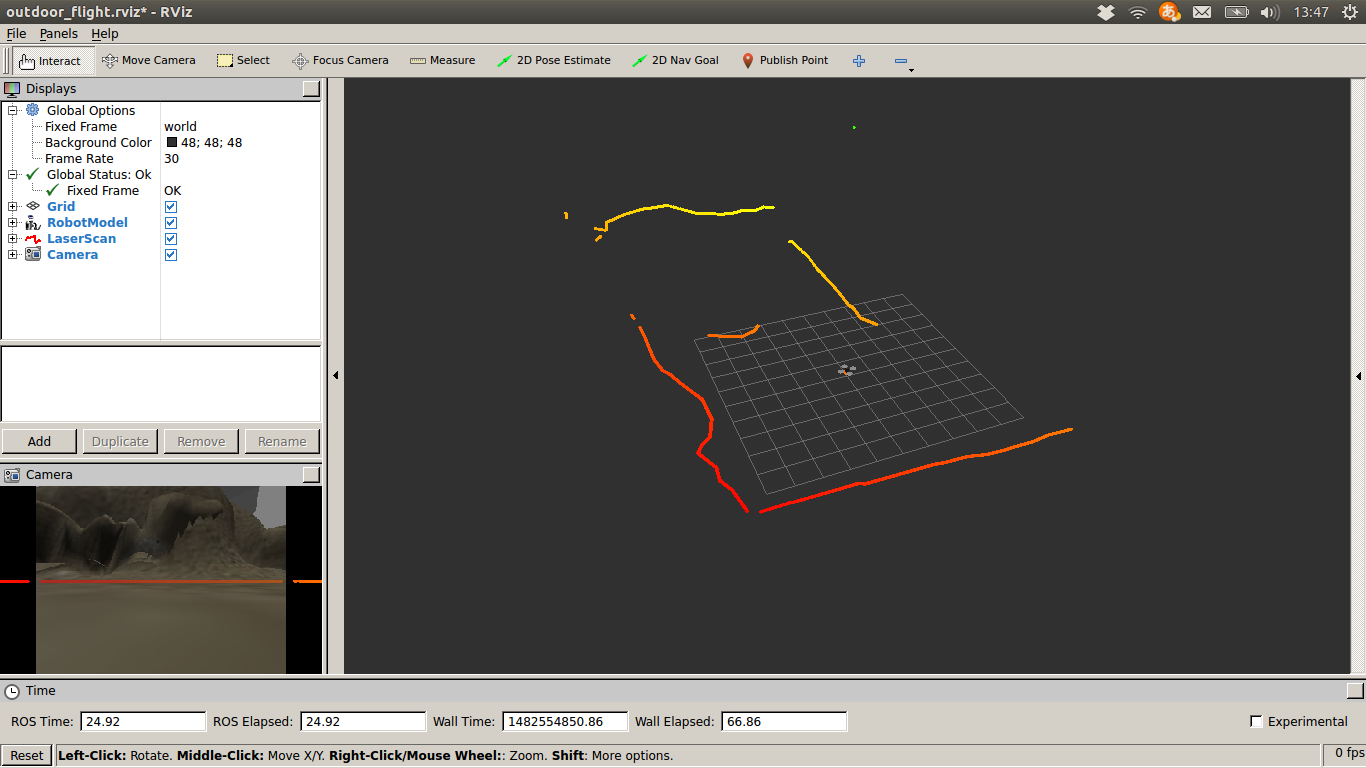
ROSとGazeboを使ったUAVのSimulatorを作成する。
DockerコンテナにSimulatorを作成します。
※Dockerのインストール方法はWeb上にたくさんあるのでグッグってみて下さい。
1. Docker hubからubuntu 14.0.4のイメージをpull
$ sudo docker pull ubuntu:trusty
2. Dockerコンテナを起動
$ sudo docker run --privileged -it -h docker --name CrazyFlie_round1 \ --env DISPLAY=unix:0 --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \ --device=/dev/input:/dev/input ubuntu:trusty /bin/bash オプション解説 コンテナからGUIアプリケーションを実行するためのオプション --env DISPLAY=unix:0 --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" ホストOSに接続されてJoyStickをコンテナから使うためのオプション --device=/dev/input:/dev/input
3. ROS Indigoのインストール
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > \
/etc/apt/sources.list.d/ros-latest.list'
$ sudo apt-key adv –keyserver hkp://ha.pool.sks-keyservers.net –recv-key 0xB01FA116
$ sudo apt-get update
$ sudo apt-get install ros-indigo-desktop-full
$ sudo rosdep init
$ rosdep update
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
3.1 rosinstallとrosと依存関係があるパッケージをインストール
$ sudo apt-get install python-rosinstall \
ros-indigo-octomap-msgs \
ros-indigo-joy \
ros-indigo-geodesy \
ros-indigo-octomap-ros \
ros-indigo-mavlink \
ros-indigo-control-toolbox \
unzip
4. simulator作成
$ env | grep ROS_MASTER_URI
ROS_MASTER_URI=http://localhost:11311
表示されない場合は下記を実行
$ export ROS_MASTER_URI=http://localhost:11311
$ sudo apt-get update
$ sudo apt-get install ros-indigo-hector-quadrotor-demo
5. simulatorの起動
$ roslaunch hector_quadrotor_demo outdoor_flight_gazebo.launch
6. Joystickを使う
新しいターミナルを開いてコンテナに接続する。
$ sudo docker exec -it <<Container Name>> /bin/bash
$ sudo su
# roslaunch hector_quadrotor_teleop xbox_controller.launch
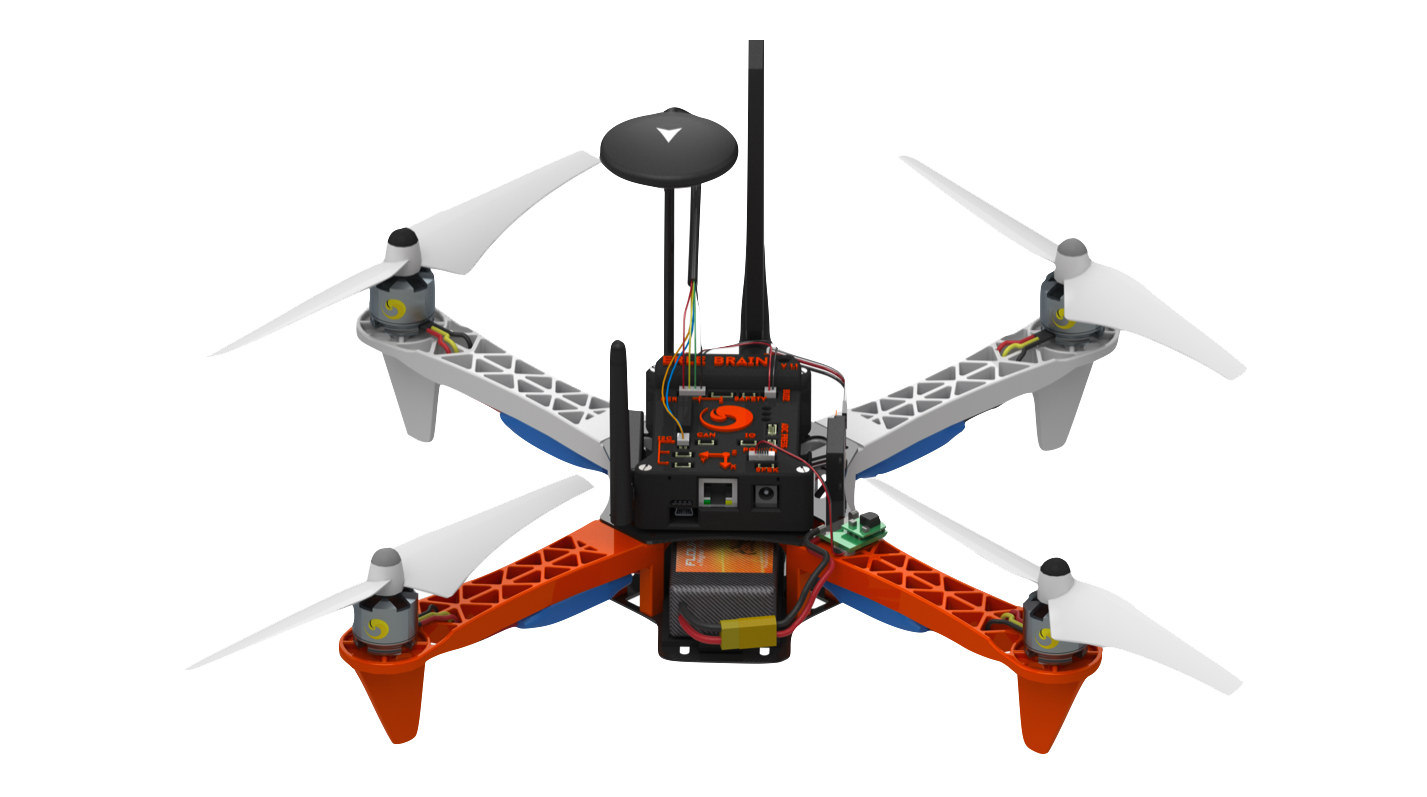
Erle-Copter Ubuntu Core special edition
これ喉から手が出るほど欲しいなぁー、でも生産終了。(非常に残念)
Erle BrainbにUbuntuを搭載していて、更にROS Indigoも使える。
http://wiki.ros.org/Robots/Erle-Copter-Ubuntu


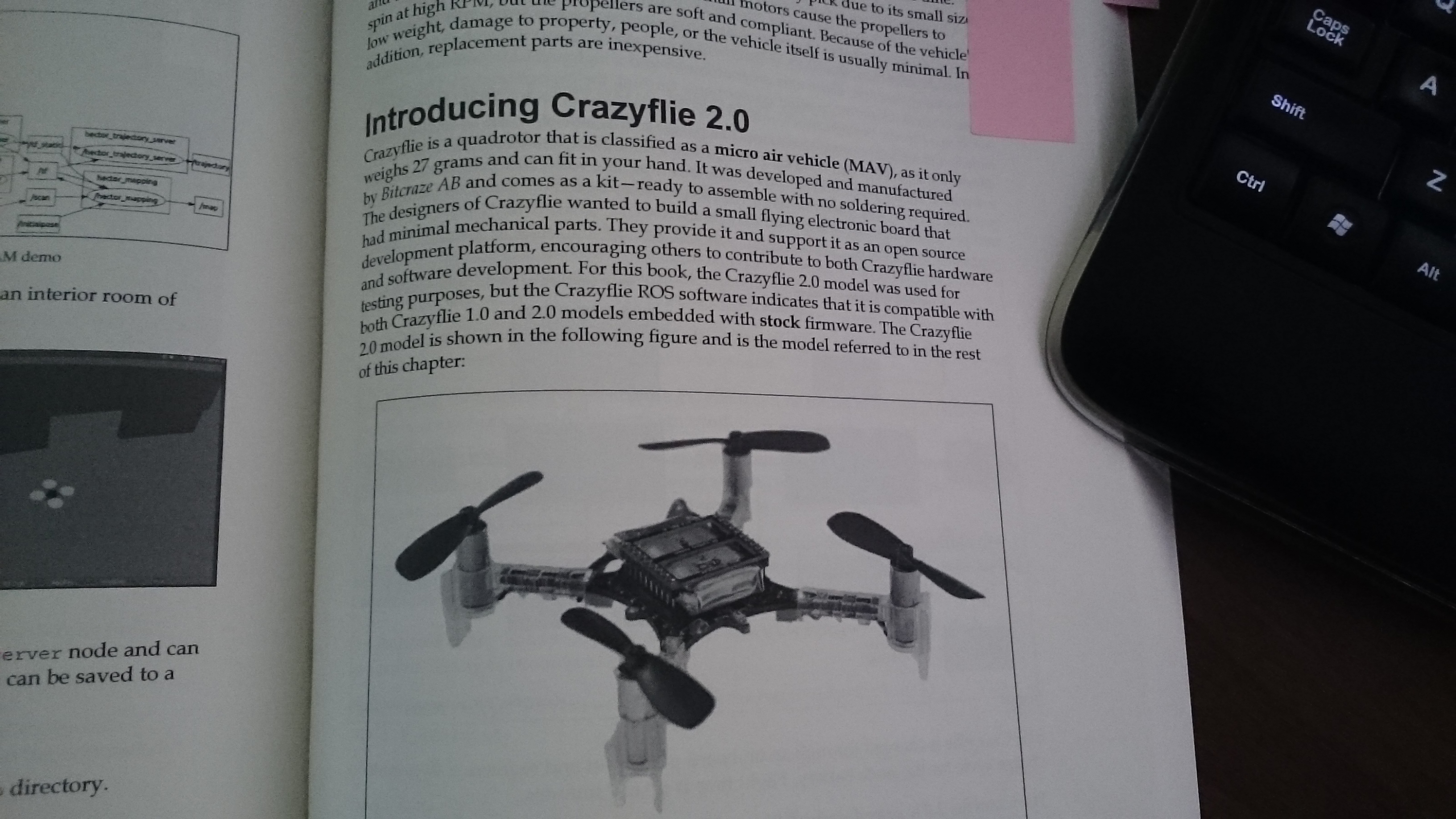
CrazyFlie2.0を購入
ROS Robotics By ExampleにCrazyFlie2.0をROSでコントロールするTutorialが載っていたので購入しました。


ThinkStation P310にROSの開発環境を構築
マシン構成
- CPU:Intel Xeon E3-1270 v5 3.6GHz
- メモリ:24GB
- HDD: 1.8TB (RAID1)
ソフトウェア構成
- HostOS:Windows10 Pro (64bit) バージョン1607
- GuestOS:Ubuntu 14.0.4LTS
- 仮想化ソフト:vmware,Docker
今回はROSやらGazeboやらMavLinkやら調査しながらの開発なので、ある時点の開発環境のスナップショットがとれるようにDockerをインストールしました。
また、Docker関連の記事は読んでいましたがいまいちピンと来ていないので、習うより慣れろって言うのもDockerをインストールした理由の一つです。
それぞれのソフトウェアのインストール手順は順次アップしていきます。